
最近一直在解决G474的ADC采样抖动问题,找到了卡尔曼滤波来过滤数据,先展示下效果:
/卡尔曼滤波,将ADC数据滤波再计算。
int KalmanFilter_Vin(int inData)
{
static float prevData = 0.0F; //先前数值
static float p = 10.0F, q = 0.0001F, r = 0.05F, kGain = 0.0F; // q控制误差 r控制响应速度
p = p + q;
kGain = p / ( p + r ); //计算卡尔曼增益
inData = prevData + ( kGain * ( inData - prevData ) ); //计算本次滤波估计值
p = ( 1.0F - kGain ) * p; //更新测量方差
prevData = inData;
return inData; //返回滤波值
}
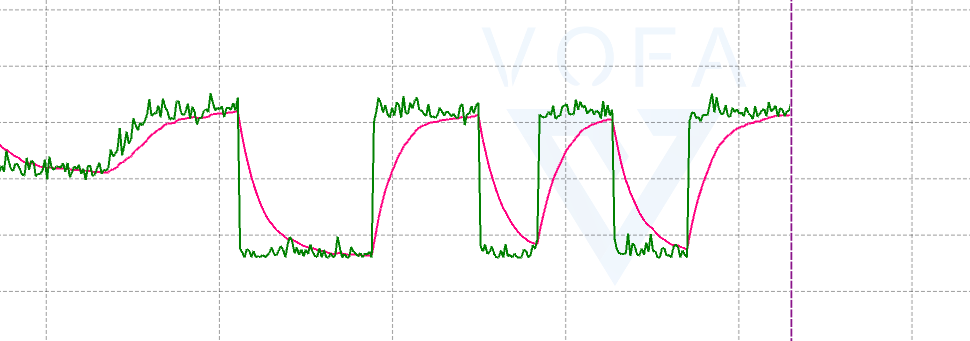
绿色为实时ADC读数,红色为卡尔曼滤波输出。
可以看出迟滞还是有点大,其实可以把r调大就可以加快相应速度,但是数据波动又会变大,所以我写了个自适应卡尔曼滤波函数:
#define THRESHOLD 60 // 设定一个阈值,用于判断数据变化是否剧烈
#define Q_MIN 0.001f // 增大 q 的最小值
#define R_MAX 100.0f // 限制 r 的最大值
#define KGAIN_MIN 0.01f // 限制卡尔曼增益的最小值
#define KGAIN_MAX 0.99f // 限制卡尔曼增益的最大值
#define STABLE_THRESHOLD 15 // 数据稳定的阈值
#define STABLE_COUNT_THRESHOLD 15 // 数据连续稳定的次数阈值
int KalmanFilter(int inData, float *prevData, float *p, float *q, float *r, int *stableCount)
{
int diff = inData - *prevData;
if (diff > THRESHOLD || diff < -THRESHOLD) {
// 数据变化剧烈,增大 q 或减小 r 以提高响应速度
*q *= 5.0f;
*r /= 5.0f;
*p += 10.0f;
*stableCount = 0;
} else {
if (abs(diff) < STABLE_THRESHOLD) {
(*stableCount)++;
if (*stableCount >= STABLE_COUNT_THRESHOLD) {
// 数据连续稳定,停止调整参数
} else {
// 数据变化缓慢,减小 q 或增大 r 以减小数据跳动
*q /= 2.0f;
if (*q < Q_MIN) {
*q = Q_MIN; // 限制 q 的最小值
}
*r *= 2.0f;
if (*r > R_MAX) {
*r = R_MAX; // 限制 r 的最大值
}
}
} else {
*stableCount = 0;
// 数据变化缓慢,减小 q 或增大 r 以减小数据跳动
*q /= 2.0f;
if (*q < Q_MIN) {
*q = Q_MIN; // 限制 q 的最小值
}
*r *= 2.0f;
if (*r > R_MAX) {
*r = R_MAX; // 限制 r 的最大值
}
}
}
// 防止 p 溢出
if (*p > FLT_MAX - *q) {
*p = FLT_MAX - *q;
}
*p = *p + *q;
float kGain = *p / (*p + *r);
// 限制卡尔曼增益的范围
if (kGain < KGAIN_MIN) {
kGain = KGAIN_MIN;
} else if (kGain > KGAIN_MAX) {
kGain = KGAIN_MAX;
}
inData = *prevData + (kGain * (inData - *prevData));
*p = (1.0f - kGain) * *p;
*prevData = inData;
return inData;
}实际测试:
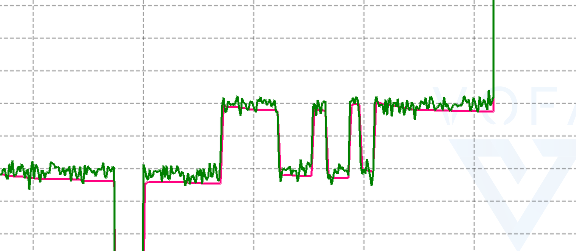
可以看出实时性很好。
Comments NOTHING